Cet ensemble regroupe 5 exemples.
Une rotation d’un vecteur
Une famille de vecteurs
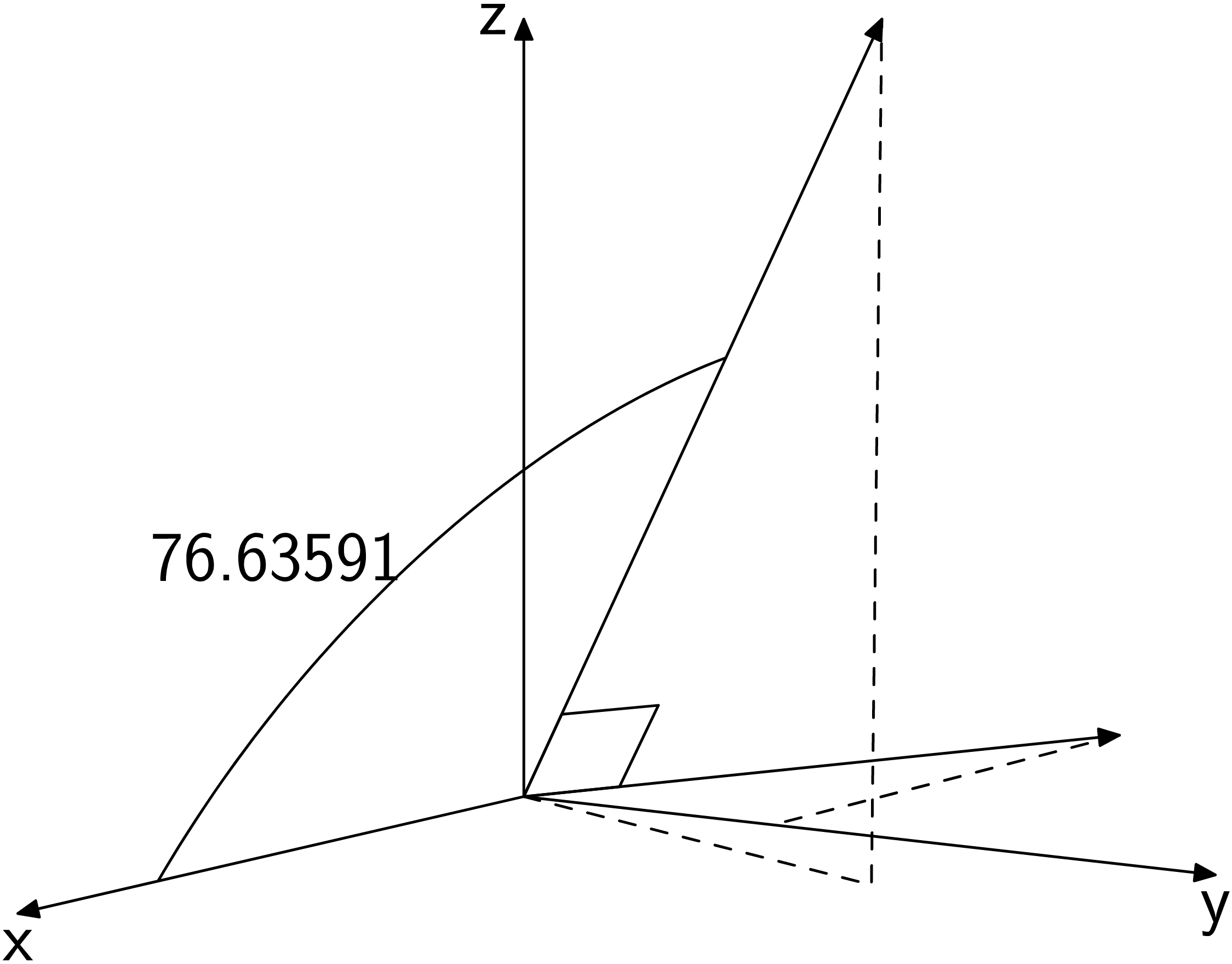
Un repère, des vecteurs et des projections (featpost)
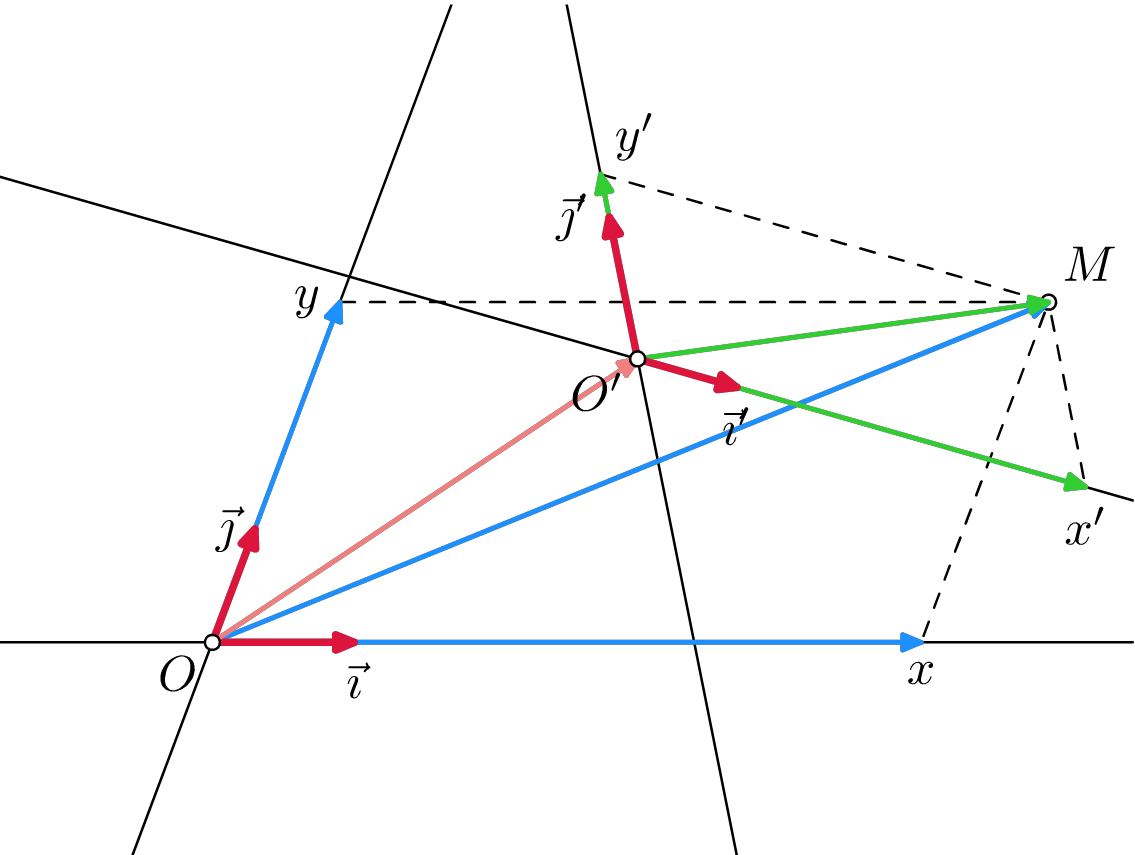
Des vecteurs et des repères (mp-geom2d)
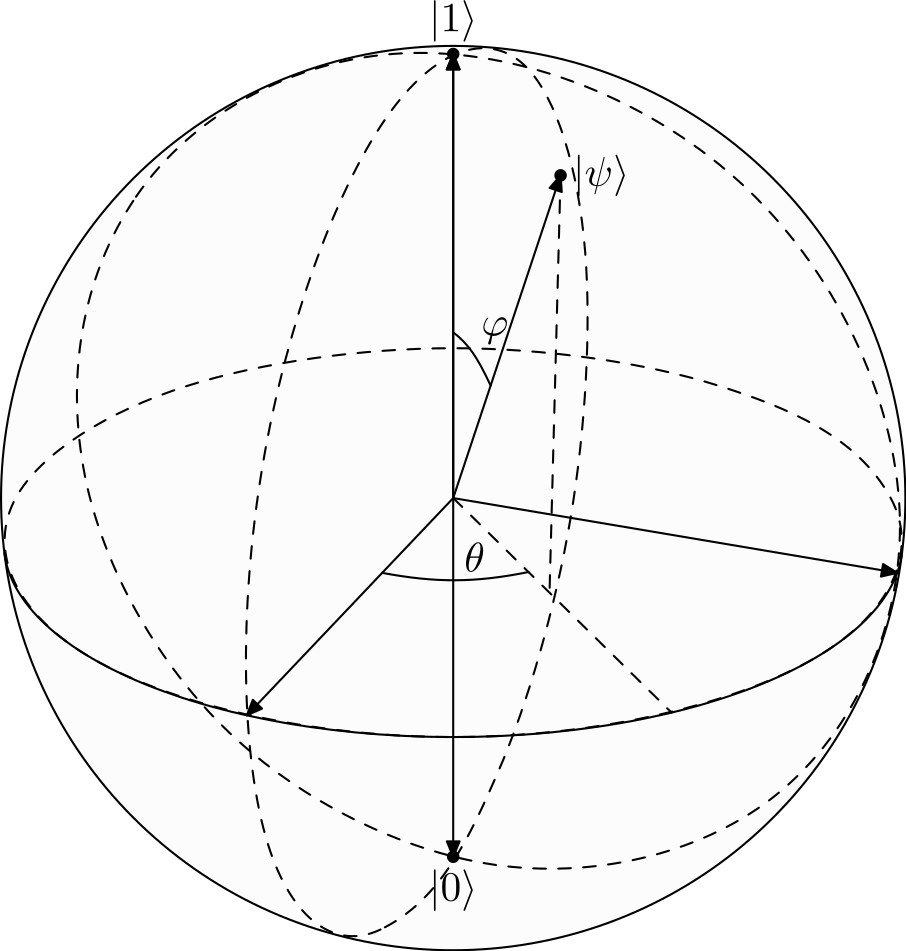
Sphère de Bloch